Qualitative Theory of Differential Equations
Critical Point
Classification: linear case

For a linear 2nd-order ODE system, \[ \mathbf{y}' = B \mathbf{y} \]
If \( B \) has real eigenvalues \( \lambda, \mu \), e.g. \( B = \begin{pmatrix} \lambda & 0 \\ 0 & \mu \end{pmatrix} \) , then \( \begin{cases} y_1 = y_1(0) e^{\lambda t} \\ y_2 = y_2(0) e^{\mu t} \end{cases} \)
- Source: \( (\lambda > \mu > 0) \)
- Sink: \( (\lambda < \mu < 0) \)
- Saddle: \( (\lambda > 0 > \mu) \)

If \( B \) has two complex conjugate eigenvalues \( a \pm ib \), e.g. \( B = \begin{pmatrix} a & b \\ -b & a \end{pmatrix} \) , then \( \begin{cases} y_1 = A e^{at} \sin(bt+\phi) \\ y_2 = A e^{at} \cos(bt+\phi) \end{cases} \)

- Unstable focus (focus): \( (a > 0) \)
- Stable focus (foci): \( (a < 0) \)
- Center: \( (a = 0) \)
Note:
- Linear systems have one or a line of critical points, since \( B \text{y} =0 \) has a unique solution or a set of solutions with dimension 1.
- Closed orbits exist around a center, and have the same period, but nonlinear systems are not so.
- For a nonlinear system, a center found in its linearized form made not be an actual center; symmetry of the original system about \(y\)-axis suffice to preserve this property.
Procedure: nonlinear case
For a nonlinear 2nd-order ODE system: \[ \frac{\text{d}}{\text{d}t} \begin{pmatrix} x \\ y \end{pmatrix} = \begin{pmatrix} f(x,y) \\ g(x,y) \end{pmatrix} \]
- Find critical points: \( \begin{pmatrix} f(x_0,y_0) \\ g(x_0,y_0) \end{pmatrix} = 0 \)
- Linearize at the critical points: \( \frac{\text{d}}{\text{d}t} \begin{pmatrix} x \\ y \end{pmatrix} = \nabla\begin{pmatrix} f(x,y) \\ g(x,y) \end{pmatrix}\bigg\rvert_{(x_0,y_0)} \begin{pmatrix} x-x_0 \\ y-y_0 \end{pmatrix} + \text{h.o.t.} \)
- Switch axes to the critical point and get \[ \frac{\text{d}}{\text{d}t} \begin{pmatrix} \tilde{x} \\ \tilde{y} \end{pmatrix} = A \begin{pmatrix} \tilde{x} \\ \tilde{y} \end{pmatrix} \] , where \(A\) is the Jacobian evaluated at the critical point.
- Normalize the coefficient matrix with \(P\), s.t. \( B= P^{-1}AP \) is a Jordan matrix.
- Solve the system w.r.t. \( P^{-1} \begin{pmatrix} \tilde{x} \\ \tilde{y} \end{pmatrix} \) as linearized cases.
Note:
- To get the phase plane of \(\begin{pmatrix} x \\ y \end{pmatrix}\) near the critical point, we just need to do a coordinate transformation, which doesn't change the type of critical point. Hence the eigenvalue of \(A\) determined the type of critical point.
- Eigenvector and orbit. If \(\begin{pmatrix} x_1 \\ y_1 \end{pmatrix}\) is an eigenvector of the linearized system, corresponding to eigenvalue \( \lambda \), along the line of the eigenvector we have \( \frac{\text{d}}{\text{d}t} \begin{pmatrix} x \\ y \end{pmatrix} = \lambda \begin{pmatrix} x_1 \\ y_1 \end{pmatrix} \). This means in the direction of the eigenvectors from the critical point, the orbit goes directly away from or into the critical point, approximately in a straight line.
Plane Analysis of 2nd-order ODE Systems
Duffing equation
 Trajectories in the Duffing equation
Trajectories in the Duffing equation
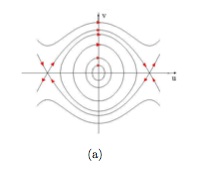
A form of Duffing equation is
\[ u'' + u - u^3 = 0 \]
Or, in the form of ODE systems,
\[ \begin{cases} u' = v \\ v' = -u+u^3 \end{cases} \]
We find three critical points: \( (0,0) \) and \( (\pm 1,0) \). Furthermore, the first one is a center, and the other two are saddles.
Heteroclinic & homoclinic orbit
 Homoclinic orbits
Homoclinic orbits
A trajectory may connect two critical points, or forms a loop from and toward the same critical point. The former one is called a heteroclinic orbit, and the latter a homoclinic orbit.
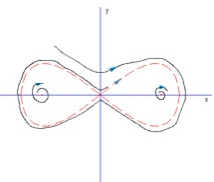
We've already seen heteroclinic orbits in duffing equation, now we illustrate a homoclinic oribt by the following system.
\[ \begin{cases} x' = y + y(1-x^2)[y^2-x^2(1-\frac{x^2}{2})] \\ y' = x(1-x^2) - y[y^2-x^2(1-\frac{x^2}{2})] \end{cases} \]
There are also three critical points: \( (0,0) \) and \( (\pm 1,0) \). The origin is a saddle, while the other two are unstable focus (foci).
Note: Period of homoclinic or heteroclinic orbit
- Generally, homoclinic and heteroclinic orbits go from and to saddle points. Since near saddle points, along the direction of eigenvectors, \( y'= \lambda y \), it takes infinite time to go to or leave the critical point.
- Hence, homo- and hetero-clinic orbits are typically with infinite period.
Limit cycle
 The Poincare-Bendixon theorem and limit cycle
The Poincare-Bendixon theorem and limit cycle
A limit cycle is a closed orbit that each trajectory nearby either goes towards it, or leaves away. It is another important type of closed orbits.
Certain theorems guarantee the existence of a limit cycle.
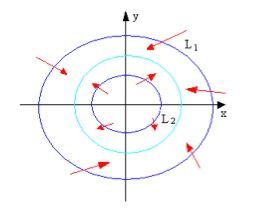
Poincare-Bendixon Theorem:
- Assume that \(B\) is a ring-shaped domain between two simple closed curves \(L_1\) and \(L_2\). There is no critical point in this domain. Moreover, any trajectory that intersects with these two curves enters \(B\). Then there exist at least one limit cycle in this domain.
- The conclusion holds if the inner boundary curve \(L_2\) shrinks into an unstable node.
van der Pol equation
Stability and Lyapunov Function
Bifurcation Theory
Chaos
References
- 王联、王慕秋, 非线性常微分方程定性分析. 哈工大出版社,1987.
- 黄永念,非线性动力学讲义,2004.
- J. Smoller, Shock Waves and Reaction Diffusion Equations, Springer (1994)
- P Grindrod, Patterns and Waves, Claredon, 1991
- G. B. Whitham, Linear and Nonlinear Waves, John Wiley & Sons (1974).